The CR series has rich interfaces that can seamlessly connect with external sensors, slides, suction cups, and other components, quickly achieving various mobile handling and loading and unloading tasks. By detecting the position of the wax paper on the material tray through a position sensor, the robot grabs the wax paper and puts it into the waxing machine. Then, the robot goes to the next waxing machine for feeding. A collaborative robot can provide feeding machine services for 5 machines. Supporting interactive methods such as graphical programming and drag teaching can significantly reduce the time and cost of debugging and deployment.
Dobot collaborative robot
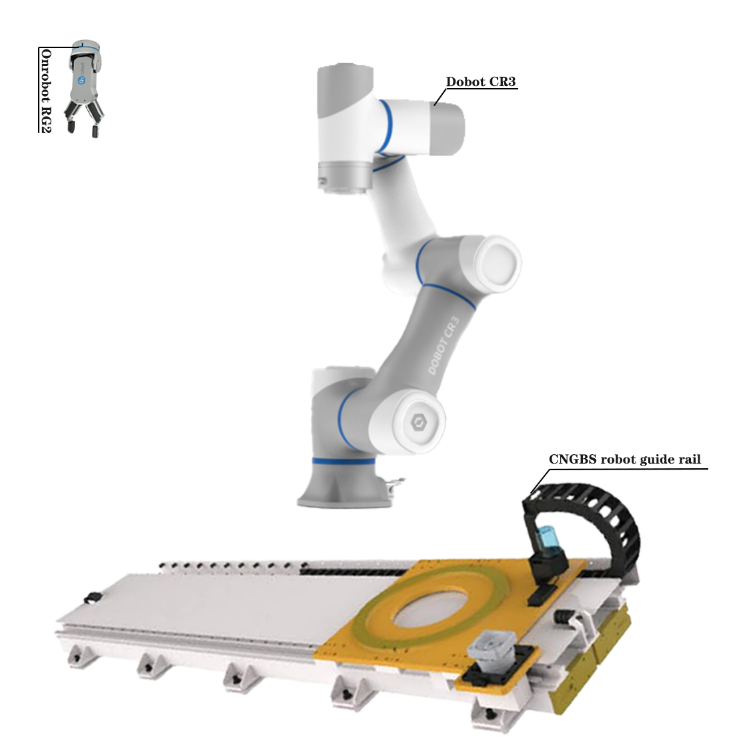
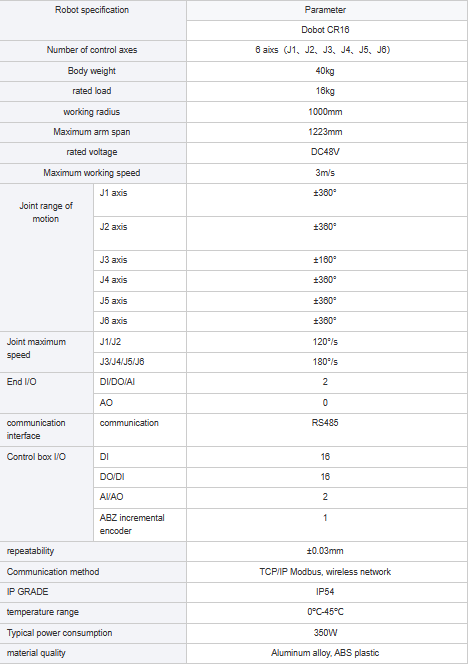
Produced in China - collaborative robot Dobot CR16, with a payload of 16kg and a working radius of 1000mm.
Collaborative robots
Specification:
PREVIOUS:PeriodNEXT:Period




Categories
News
Contact Us
Contact: CNGBS Industrial Robot
Phone: 86-15821419272
Tel: 86-15821419272
E-mail: daisy@gongboshi.com
Add: 611, Building A3, Zhonganchuanggu Technology Park, No.900, West Wangjiang Road, Gaoxin Area,Hefei, Anhui,China